
وقتی صحبت از روشهای جابجایی رباتها میشود، وجود چرخ برای بعضی از آنها خوب است، در حالی که وجود پا برای بعضی دیگر بهتر است. دانشمندان اکنون در حال کار بر روی یک ربات چرخ دار با ترکیبی از آنها هستند، یعنی چرخ هایی که به پایه تبدیل می شوند. در ادامه این مطلب از مجله دلتا درباره این ربات چرخ دار بخوانید.

این ربات که با نام “α-WaLTR”(ربات مبدل چرخ و پایه) شناخته می شود، توسط تیمی در دانشگاه A&M تگزاس و به عنوان بخشی از برنامه رباتیک وزارت دفاع آمریکا موسوم به “OFFSET Sprint-5” در حال ساخت است.
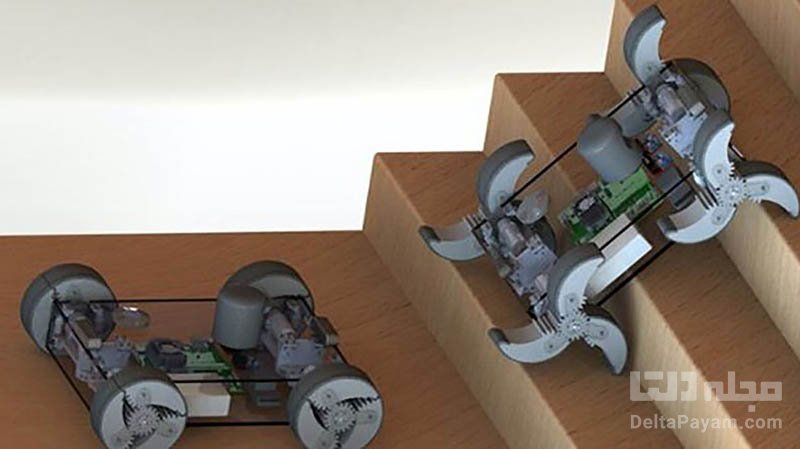
ربات “α-WaLTR” روی سطوح نسبتاً مسطح و صاف به سرعت و با کارآیی بالا با چرخهای لاستیکی عاج دار خود عبور میکند و هنگامی که با موانعی مانند پلهها، سنگها و غیره روبرو میشود، چرخهای آن از هم باز و باعث میشود تا به سه قسمت پنجهای شکل باز شود. سپس هر کدام از این پنجهها با حرکت رو به جلو میتوانند “α-WaLTR” را به بالا بکشند تا از موانع یا پلهها عبور کند.
این ربات طبق برنامهریزیهای انجام شده به طور مستقل کار میکند و توسط حسگرهای داخلی و سیستمهای تصویربرداری به طور خودکار بین حالت چرخدار و پایهای جابجا میشود.
اگرچه این ربات برای آژانس پروژههای تحقیقاتی پیشرفته دفاعی آمریکا (DARPA) ساخته شده است، اما لزوماً محدود به استفاده نیروهای مسلح نخواهد بود.
پروفسور “کیجو لی” مدیر این پروژه گفت: در حالی که تمرکز فعلی بر روی برنامههای دفاعی و سایر برنامههای نظامی است، این نوع ربات چرخ دار و سازگار میتوانند در بسیاری از حوزههای دیگر مانند فضا، خدمات خانگی، خدمات نظارتی و کشاورزی استفاده شوند.
محققان می گویند امید است که نمونه اولیه عملکردی این ربات تا فوریه سال آینده برای نمایش آماده باشد.
بیشتر بخوانید: گوگل مپ در جدیدترین بهروزرسانی خود، قابلیتهایی برای مسیریابی دوچرخه سواران اضافه میکند. برای مطالعه بیشتر مطلب«مسیریابی دوچرخه سواران با قابلیت جدید Google Maps» را بخوانید.


















ناشناس
۲۳ آبان ۱۳۹۹ در ۷:۵۱ ق٫ظ